Publications
2026
- Active Inference
 What Type of Inference is Active Inference?Wouter W. L. Nuijten, Mykola Lukashchuk, Thijs van de Laar, and 1 more authorAccepted at the Conference on Uncertainty in Artificial Intelligence (UAI) 2026 , Jun 2026
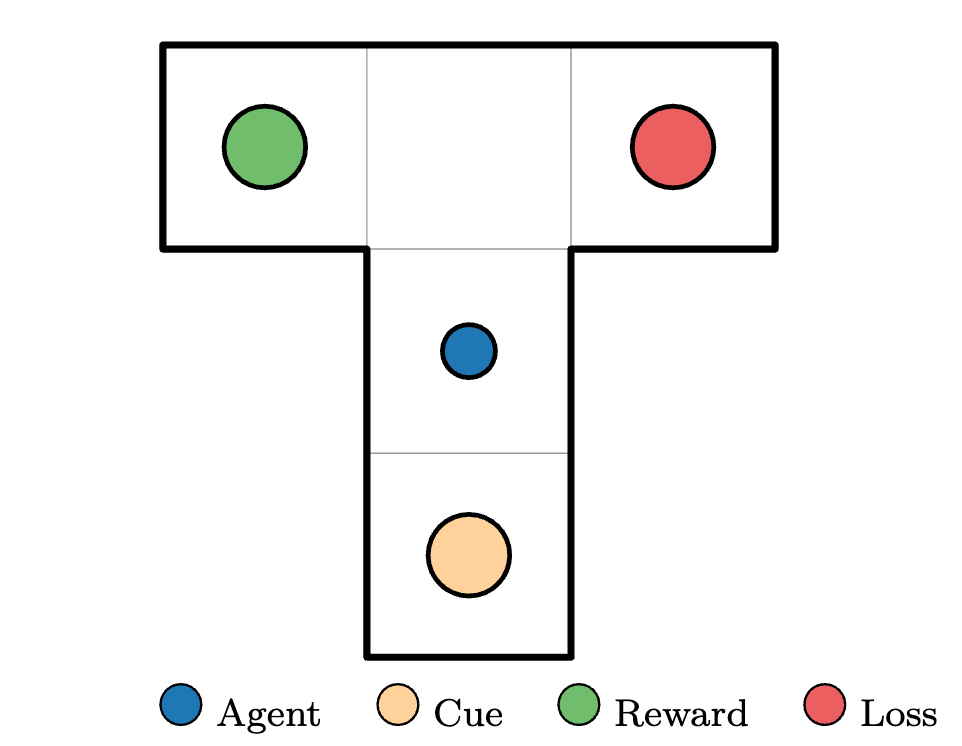
What Type of Inference is Active Inference?Wouter W. L. Nuijten, Mykola Lukashchuk, Thijs van de Laar, and 1 more authorAccepted at the Conference on Uncertainty in Artificial Intelligence (UAI) 2026 , Jun 2026Active inference casts decision-making as inference, with the Expected Free Energy (EFE) unifying goal-directed and information-seeking behavior. Recent work showed that EFE minimization can be written as Variational Free Energy (VFE) minimization on a generative model augmented with epistemic priors. We prove that the VFE of the augmented model can be rewritten as the VFE of the predictive model plus explicit entropy-correction terms, making the EFE contribution transparent. We then show that proper EFE-based planning requires combining these epistemic corrections with a planning correction that turns marginal inference into policy optimization, yielding a full variational characterization of EFE-based planning. This clarifies which corrections are needed for cross-entropy planning and for full EFE-based planning. The same entropy-corrected formulation leads to a detailed message-passing scheme for EFE-based planning together with simpler ablations. Experiments on three grid-world environments show that the planning correction already helps when observations are decisive, whereas the additional observation-side epistemic corrections matter most when observations are merely suggestive.
@misc{nuijten_what_2026, title = {What {{Type}} of {{Inference}} is {{Active Inference}}?}, author = {Nuijten, Wouter W. L. and Lukashchuk, Mykola and {van de Laar}, Thijs and {de Vries}, Bert}, year = {2026}, month = jun, doi = {10.48550/arXiv.2606.04935}, archiveprefix = {arXiv}, primaryclass = {cs.AI}, url = {https://arxiv.org/abs/2606.04935}, } - Active Inference
 Expected Free Energy-Based Planning as Variational InferenceWouter W. L. Nuijten, Thijs van de Laar, and Bert de VriesTransactions on Machine Learning Research, 2026
Expected Free Energy-Based Planning as Variational InferenceWouter W. L. Nuijten, Thijs van de Laar, and Bert de VriesTransactions on Machine Learning Research, 2026@article{nuijten_expected_2026, title = {Expected Free Energy-Based Planning as Variational Inference}, author = {Nuijten, Wouter W. L. and {van de Laar}, Thijs and {de Vries}, Bert}, year = {2026}, journal = {Transactions on Machine Learning Research}, issn = {2835-8856}, url = {https://openreview.net/forum?id=Kzm8I1oS1s} } -
 A Probabilistic Generative Model for Spectral Speech EnhancementMarco Hidalgo-Araya, Raphael Tresor, Bart van Erp, and 3 more authorsIEEE Open Journal of Signal Processing, 2026
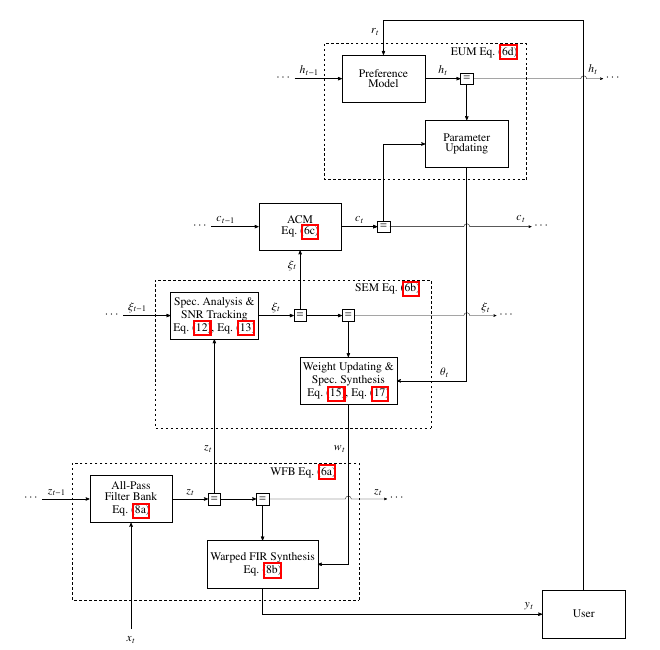
A Probabilistic Generative Model for Spectral Speech EnhancementMarco Hidalgo-Araya, Raphael Tresor, Bart van Erp, and 3 more authorsIEEE Open Journal of Signal Processing, 2026Speech enhancement in hearing aids remains difficult in nonstationary acoustic environments. This paper introduces AIDA-2, a unified modular framework that formulates signal processing, learning, and personalization as Bayesian inference with explicit uncertainty tracking. The proposed framework replaces ad hoc algorithm design with a single probabilistic generative model that continuously adapts to changing acoustic conditions and user preferences. It extends spectral subtraction with principled mechanisms for in situ personalization and adaptation to acoustic context. The system is implemented as an interconnected probabilistic state-space model, and inference is performed via variational message passing in the RxInfer.jl probabilistic programming environment, enabling real-time Bayesian processing under hearing-aid constraints. We focus the evaluation on the warped-frequency filter bank (WFB) and speech enhancement model (SEM), evaluated on the public VoiceBank+DEMAND corpus. Additionally, an acoustic context model (ACM) and end-user model (EUM) are described architecturally. The evaluated system requires 85 parameters, two orders of magnitude fewer than the tens of thousands to millions of trainable parameters used by contemporary deep-learning baselines. This proof of concept establishes an interpretable, data-efficient foundation for uncertainty-aware hearing-aid processing, pointing toward devices that learn continuously through probabilistic inference.
@article{hidalgo-araya_probabilistic_2026, title = {A {{Probabilistic Generative Model}} for {{Spectral Speech Enhancement}}}, author = {{Hidalgo-Araya}, Marco and Tresor, Raphael and {van Erp}, Bart and Nuijten, Wouter W. L. and {van de Laar}, Thijs and {de Vries}, Bert}, year = {2026}, journal = {IEEE Open Journal of Signal Processing}, pages = {1--22}, issn = {2644-1322}, doi = {10.1109/OJSP.2026.3695788}, urldate = {2026-05-23}, keywords = {Bayesian Inference,Belief Propagation,Filtering,Filters,Forney-style Factor Graphs,Hearing Aids,Licenses,Modeling,Noise,Nuclear facility regulation,Probabilistic Graphical Models,Scanning electron microscopy,Speech,Speech enhancement,Speech Enhancement,Timing,Variational Inference,Variational Message Passing}, } - Active Inference
 A Message Passing Realization of Expected Free Energy MinimizationWouter W. L. Nuijten, Mykola Lukashchuk, Thijs van de Laar, and 1 more authorIn Active Inference, Apr 2026
A Message Passing Realization of Expected Free Energy MinimizationWouter W. L. Nuijten, Mykola Lukashchuk, Thijs van de Laar, and 1 more authorIn Active Inference, Apr 2026The paper was awarded the best technical paper award at the International Workshop on Active Inference 2025
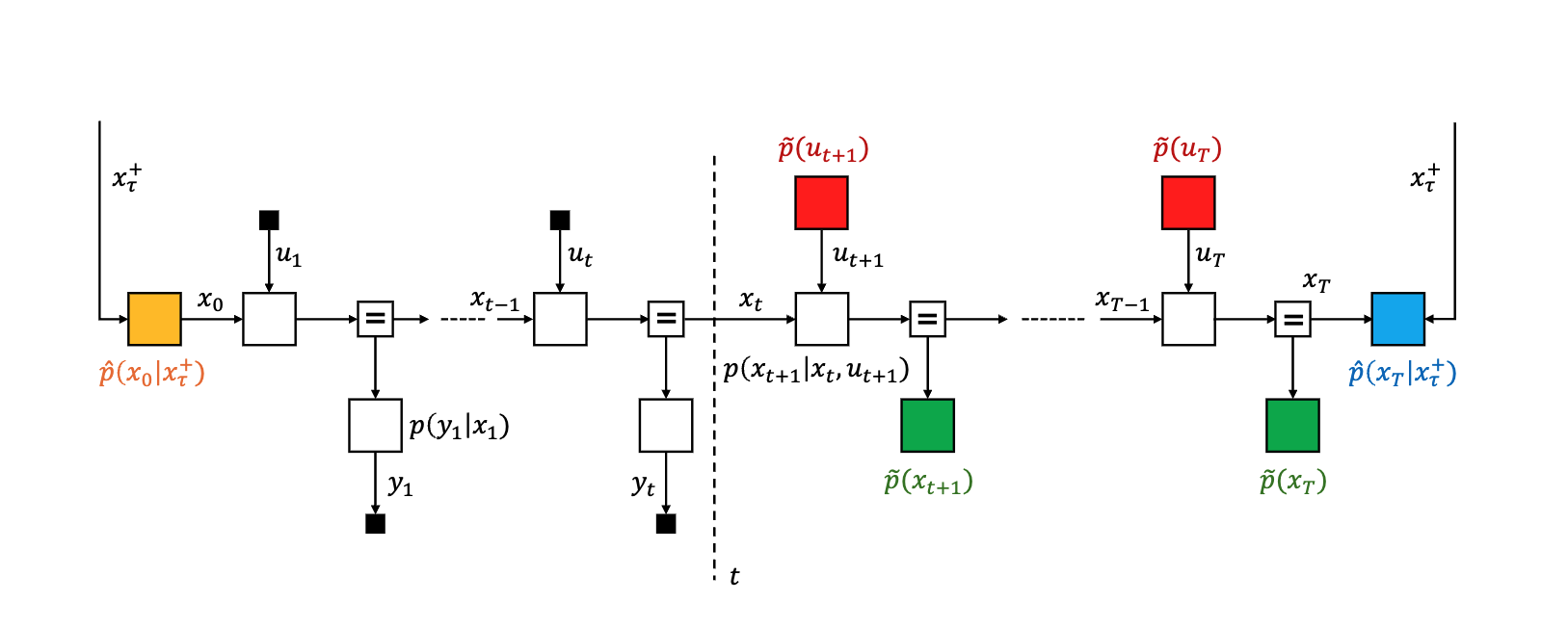
We present a message passing approach to Expected Free Energy (EFE) minimization on factor graphs, based on the theory introduced in arXiv:2504.14898. By reformulating EFE minimization as Variational Free Energy minimization with epistemic priors, we transform a combinatorial search problem into a tractable inference problem solvable through standard variational techniques. Applying our message passing method to factorized state-space models enables efficient policy inference. We evaluate our method on environments with epistemic uncertainty: a stochastic gridworld and a partially observable Minigrid task. Agents using our approach consistently outperform conventional KL-control agents on these tasks, showing more robust planning and efficient exploration under uncertainty. In the stochastic gridworld environment, EFE-minimizing agents avoid risky paths, while in the partially observable minigrid setting, they conduct more systematic information-seeking. This approach bridges active inference theory with practical implementations, providing empirical evidence for the efficiency of epistemic priors in artificial agents.
@inproceedings{nuijten_message_2026, title = {A {{Message Passing Realization}} of {{Expected Free Energy Minimization}}}, author = {Nuijten, Wouter W. L. and Lukashchuk, Mykola and {van de Laar}, Thijs and {de Vries}, Bert}, editor = {Albarracin, Mahault and Benrimoh, David and Buckley, Christopher L. and Lanillos, Pablo and Pitliya, Riddhi J. and Shimazaki, Hideaki and Stoianov, Ivilin Peev and Verbelen, Tim and Wisse, Martijn}, booktitle = {Active {{Inference}}}, pages = {75--98}, publisher = {Springer Nature Switzerland}, address = {Cham}, year = {2026}, month = apr, doi = {10.1007/978-3-032-16955-6_5}, url = {https://doi.org/10.1007/978-3-032-16955-6_5}, isbn = {978-3-032-16955-6}, keywords = {Active Inference,Epistemic Planning,Expected Free Energy,Factor Graphs,Message Passing}, archiveprefix = {arXiv}, primaryclass = {cs}, } - Active Inference
 Message passing-based inference in an autoregressive active inference agentIn , 2026
Message passing-based inference in an autoregressive active inference agentIn , 2026We present the design of an autoregressive active inference agent in the form of message passing on a factor graph. Expected free energy is derived and distributed across a planning graph. The proposed agent is validated on a robot navigation task, demonstrating exploration and exploitation in a continuous-valued observation space with bounded continuous-valued actions. Compared to a classical optimal controller, the agent modulates action based on predictive uncertainty, arriving later but with a better model of the robot’s dynamics.
@inproceedings{kouw_message_2025, title = {Message passing-based inference in an autoregressive active inference agent}, editor = {Albarracin, Mahault and Benrimoh, David and Buckley, Christopher L. and Lanillos, Pablo and Pitliya, Riddhi J. and Shimazaki, Hideaki and Stoianov, Ivilin Peev and Verbelen, Tim and Wisse, Martijn}, year = {2026}, pages = {285--298}, publisher = {Springer Nature Switzerland}, address = {Cham}, doi = {10.1007/978-3-032-16955-6_16}, isbn = {978-3-032-16955-6}, langid = {english}, keywords = {Active inference,Autoregressive models,Factor graphs,Free energy minimization,Intelligent agents,Message passing}, }
2025
- Active InferenceActive Inference is a Subtype of Variational InferenceWouter W. L. Nuijten and Mykola LukashchukEurIPS 2025 Workshop on Epistemic Intelligence in Machine Learning, Dec 2025
Automated decision-making under uncertainty requires balancing exploitation and exploration. Classical methods treat these separately using heuristics, while Active Inference unifies them through Expected Free Energy (EFE) minimization. However, EFE minimization is computationally expensive, limiting scalability. We build on recent theory recasting EFE minimization as variational inference, formally unifying it with Planning-as-Inference and showing the epistemic drive as a unique entropic contribution. Our main contribution is a novel message-passing scheme for this unified objective, enabling scalable Active Inference in factored-state MDPs and overcoming high-dimensional planning intractability.
@article{nuijten_active_2025, title = {Active Inference is a Subtype of Variational Inference}, author = {Nuijten, Wouter W. L. and Lukashchuk, Mykola}, journal = {EurIPS 2025 Workshop on Epistemic Intelligence in Machine Learning}, year = {2025}, month = dec, archiveprefix = {arXiv}, } - Bayesian Inference
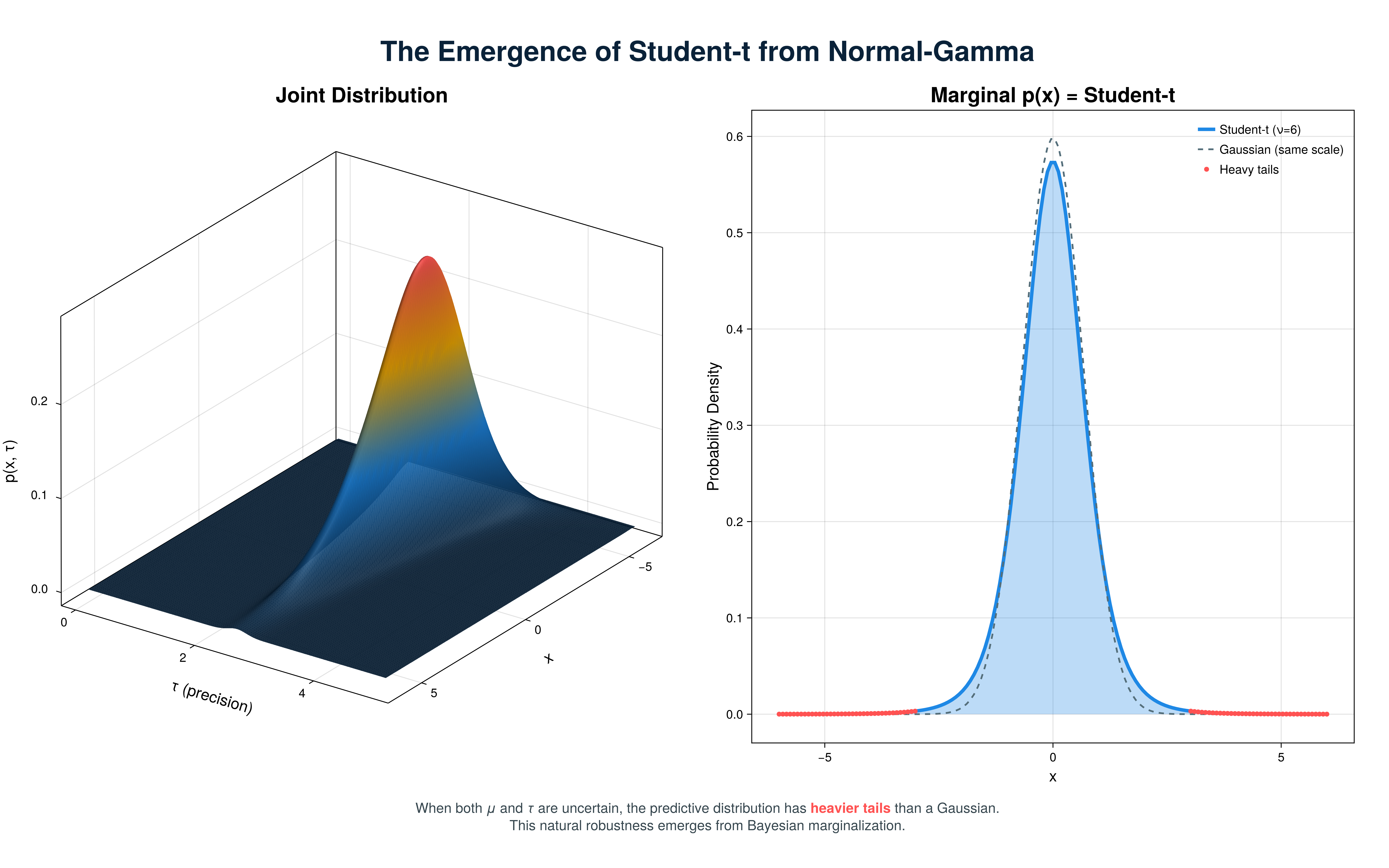 The Quotient Bayesian Learning RuleMykola Lukashchuk, Raphaël Trésor, Wouter W. L. Nuijten, and 2 more authorsIn Advances in Neural Information Processing Systems, Dec 2025
The Quotient Bayesian Learning RuleMykola Lukashchuk, Raphaël Trésor, Wouter W. L. Nuijten, and 2 more authorsIn Advances in Neural Information Processing Systems, Dec 2025@inproceedings{lukashchuk_quotient_2025, title = {The Quotient Bayesian Learning Rule}, author = {Lukashchuk, Mykola and Tr{\'e}sor, Rapha{\"e}l and Nuijten, Wouter W. L. and {\c{S}}en{\"o}z, {\.{I}}smail and {de Vries}, Bert}, editor = {Belgrave, D. and Zhang, C. and Lin, H. and Pascanu, R. and Koniusz, P. and Ghassemi, M. and Chen, N.}, booktitle = {Advances in Neural Information Processing Systems}, year = {2025}, month = dec, volume = {38}, pages = {8788--8827}, publisher = {Curran Associates, Inc.}, } - Active Inference
 Expected Free Energy-based Planning as Variational InferenceBert de Vries, Wouter W. L. Nuijten, Thijs van de Laar, and 13 more authorsMay 2025
Expected Free Energy-based Planning as Variational InferenceBert de Vries, Wouter W. L. Nuijten, Thijs van de Laar, and 13 more authorsMay 2025We address the problem of planning under uncertainty, where an agent must choose actions that not only achieve desired outcomes but also reduce uncertainty. Traditional methods often treat exploration and exploitation as separate objectives, lacking a unified inferential foundation. Active inference, grounded in the Free Energy Principle, provides such a foundation by minimizing Expected Free Energy (EFE), a cost function that combines utility with epistemic drives, such as ambiguity resolution and novelty seeking. However, the computational burden of EFE minimization had remained a significant obstacle to its scalability. In this paper, we show that EFE-based planning arises naturally from minimizing a variational free energy functional on a generative model augmented with preference and epistemic priors. This result reinforces theoretical consistency with the Free Energy Principle by casting planning under uncertainty itself as a form of variational inference. Our formulation yields policies that jointly support goal achievement and information gain, while incorporating a complexity term that accounts for bounded computational resources. This unifying framework connects and extends existing methods, enabling scalable, resource-aware implementations of active inference agents.
@misc{devries_expected_2025, title = {Expected Free Energy-based Planning as Variational Inference}, author = {{de Vries}, Bert and Nuijten, Wouter W. L. and {van de Laar}, Thijs and Kouw, Wouter M. and Adamiat, Sepideh and Nisslbeck, Tim and Lukashchuk, Mykola and Nguyen, Hoang Minh Huu and Araya, Marco Hidalgo and Tresor, Raphael and Jenneskens, Thijs and Nikoloska, Ivana and Subramanian, Raaja Ganapathy and {van Erp}, Bart and Bagaev, Dmitry and Podusenko, Albert}, year = {2025}, month = may, doi = {10.48550/arXiv.2504.14898}, number = {arXiv:2504.14898}, publisher = {arXiv}, archiveprefix = {arXiv}, primaryclass = {stat.ML}, url = {https://arxiv.org/abs/2504.14898}, }
2024
- Bayesian InferenceRiemannian Black Box Variational InferenceMykola Lukashchuk, Wouter W. L. Nuijten, Dmitry Bagaev, and 2 more authorsIn NeurIPS 2024 Workshop on Bayesian Decision-making and Uncertainty, Dec 2024
We introduce Riemannian Black Box Variational Inference (RBBVI) for scenarios lacking gradient information of the model with respect to its parameters. Our method constrains posterior marginals to exponential families, optimizing variational free energy using Riemannian geometry and gradients of the log-partition function. It excels with black-box or nondifferentiable models, where popular methods fail. We demonstrate efficacy by inferring parameters from the SIR model and tuning neural network learning rates. The results show competitive performance with gradient-based (NUTS) and gradient-free (Latent Slice Sampling) methods, achieving better coverage and matching Bayesian optimization with fewer evaluations. RBBVI extends variational inference to settings where model gradients are unavailable, improving efficiency and flexibility for real-world applications.
@inproceedings{lukashchuk_riemannian_2024, title = {Riemannian Black Box Variational Inference}, author = {Lukashchuk, Mykola and Nuijten, Wouter W. L. and Bagaev, Dmitry and {\c{S}}en{\"o}z, {\.{I}}smail and {de Vries}, Bert}, booktitle = {NeurIPS 2024 Workshop on Bayesian Decision-making and Uncertainty}, year = {2024}, month = dec, } - ProbProg
 GraphPPL. jl: A Probabilistic Programming Language for Graphical ModelsWouter W. L. Nuijten, Dmitry Bagaev, and Bert de VriesEntropy, Oct 2024
GraphPPL. jl: A Probabilistic Programming Language for Graphical ModelsWouter W. L. Nuijten, Dmitry Bagaev, and Bert de VriesEntropy, Oct 2024@article{nuijten_graphppljl_2024, title = {GraphPPL. jl: A Probabilistic Programming Language for Graphical Models}, author = {Nuijten, Wouter W. L. and Bagaev, Dmitry and {de Vries}, Bert}, journal = {Entropy}, volume = {26}, number = {11}, pages = {890}, year = {2024}, doi = {10.3390/e26110890}, issn = {1099-4300}, month = oct, publisher = {MDPI}, } - Active Inference
 Reactive Environments for Active Inference Agents with RxEnvironments.jlWouter W. L. Nuijten and Bert de VriesIn International Workshop on Active Inference, 2024
Reactive Environments for Active Inference Agents with RxEnvironments.jlWouter W. L. Nuijten and Bert de VriesIn International Workshop on Active Inference, 2024RxEnvironments was awarded the best presentation award at the International Workshop on Active Inference 2024
Active Inference is a framework that emphasizes the interaction between agents and their environment. While the framework has seen significant advancements in the development of agents, the environmental models are often borrowed from reinforcement learning problems, which may not fully capture the complexity of multi-agent interactions or allow complex, conditional communication. This paper introduces Reactive Environments, a comprehensive paradigm that facilitates complex multi-agent communication. In this paradigm, both agents and environments are defined as entities encapsulated by boundaries with interfaces. This setup facilitates a robust framework for communication in nonequilibrium-Steady-State systems, allowing for complex interactions and information exchange. We present a Julia package RxEnvironments.jl, which is a specific implementation of Reactive Environments, where we utilize a Reactive Programming style for efficient implementation. The flexibility of this paradigm is demonstrated through its application to several complex, multi-agent environments. These case studies highlight the potential of Reactive Environments in modeling sophisticated systems of interacting agents.
@inproceedings{nuijten_reactive_2024, title = {Reactive Environments for Active Inference Agents with RxEnvironments.jl}, author = {Nuijten, Wouter W. L. and {de Vries}, Bert}, booktitle = {International Workshop on Active Inference}, pages = {147--161}, year = {2024}, archiveprefix = {arXiv}, primaryclass = {eess}, doi = {10.48550/arXiv.2409.11087}, organization = {Springer}, } - Bayesian InferenceOnline Structure Learning with Dirichlet Processes Through Message PassingBart van Erp, Wouter W. L. Nuijten, and Bert de VriesIn International Workshop on Active Inference, Sep 2024
@inproceedings{vanerp_online_2024, title = {Online Structure Learning with Dirichlet Processes Through Message Passing}, author = {{van Erp}, Bart and Nuijten, Wouter W. L. and {de Vries}, Bert}, booktitle = {International Workshop on Active Inference}, pages = {91--104}, year = {2024}, doi = {10.1007/978-3-031-77138-5_6}, url = {https://doi.org/10.1007/978-3-031-77138-5_6}, organization = {Springer}, month = sep, } - Deep Learning
 Node classification in random treesWouter W. L. Nuijten and Vlado MenkovskiIn International Symposium on Intelligent Data Analysis, Apr 2024
Node classification in random treesWouter W. L. Nuijten and Vlado MenkovskiIn International Symposium on Intelligent Data Analysis, Apr 2024We propose a method for the classification of objects that are structured as random trees. Our aim is to model a distribution over the node label assignments in settings where the tree data structure is associated with node attributes (typically high dimensional embeddings). The tree topology is not predetermined and none of the label assignments are present during inference. Other methods that produce a distribution over node label assignment in trees (or more generally in graphs) either assume conditional independence of the label assignment, operate on a fixed graph topology, or require part of the node labels to be observed. Our method defines a Markov Network with the corresponding topology of the random tree and an associated Gibbs distribution. We parameterize the Gibbs distribution with a Graph Neural Network that operates on the random tree and the node embeddings. This allows us to estimate the likelihood of node assignments for a given random tree and use MCMC to sample from the distribution of node assignments. We evaluate our method on the tasks of node classification in trees on the Stanford Sentiment Treebank dataset. Our method outperforms the baselines on this dataset, demonstrating its effectiveness for modeling joint distributions of node labels in random trees.
@inproceedings{nuijten_node_2024, title = {Node classification in random trees}, author = {Nuijten, Wouter W. L. and Menkovski, Vlado}, booktitle = {International Symposium on Intelligent Data Analysis}, pages = {105--116}, year = {2024}, archiveprefix = {arXiv}, doi = {10.1007/978-3-031-58547-0_9}, url = {https://doi.org/10.1007/978-3-031-58547-0_9}, organization = {Springer}, month = apr, }
2023
- Bayesian InferenceAutomating Model Comparison in Factor GraphsBart van Erp, Wouter W. L. Nuijten, Thijs van de Laar, and 1 more authorEntropy, Jul 2023
Bayesian state and parameter estimation have been automated effectively in a variety of probabilistic programming languages. The process of model comparison on the other hand, which still requires error-prone and time-consuming manual derivations, is often overlooked despite its importance. This paper efficiently automates Bayesian model averaging, selection, and combination by message passing on a Forney-style factor graph with a custom mixture node. Parameter and state inference, and model comparison can then be executed simultaneously using message passing with scale factors. This approach shortens the model design cycle and allows for the straightforward extension to hierarchical and temporal model priors to accommodate for modeling complicated time-varying processes.
@article{vanerp_automating_2023, title = {Automating Model Comparison in Factor Graphs}, author = {{van Erp}, Bart and Nuijten, Wouter W. L. and {van de Laar}, Thijs and {de Vries}, Bert}, journal = {Entropy}, volume = {25}, number = {8}, pages = {1138}, year = {2023}, doi = {10.3390/e25081138}, issn = {1099-4300}, month = jul, publisher = {MDPI}, }
2021
- Database Tech
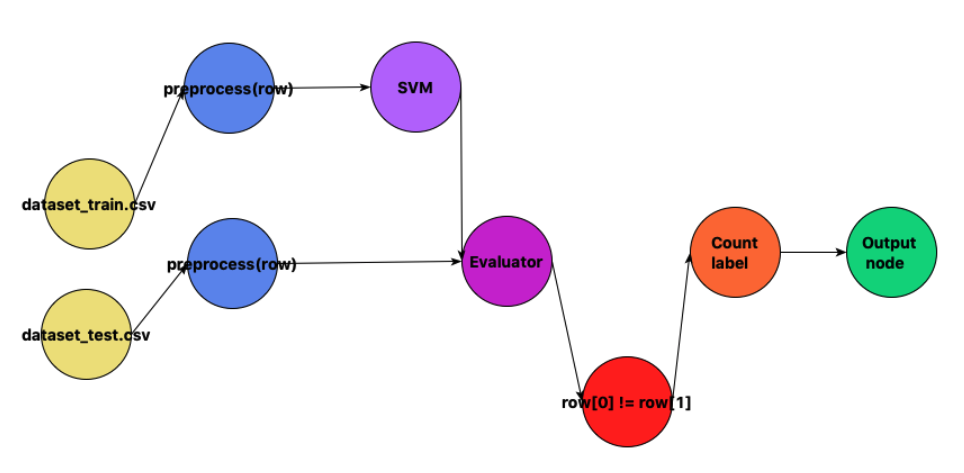 Easy Spark.Ylaise van den Wildenberg, Wouter W. L. Nuijten, and Odysseas PapapetrouIn EDBT/ICDT Workshops, 2021
Easy Spark.Ylaise van den Wildenberg, Wouter W. L. Nuijten, and Odysseas PapapetrouIn EDBT/ICDT Workshops, 2021@inproceedings{vandenwildenberg_easy_2021, title = {Easy Spark.}, author = {{van den Wildenberg}, Ylaise and Nuijten, Wouter W. L. and Papapetrou, Odysseas}, booktitle = {EDBT/ICDT Workshops}, year = {2021}, publisher = {CEUR-WS.org}, }
2019
- Eye Tracking
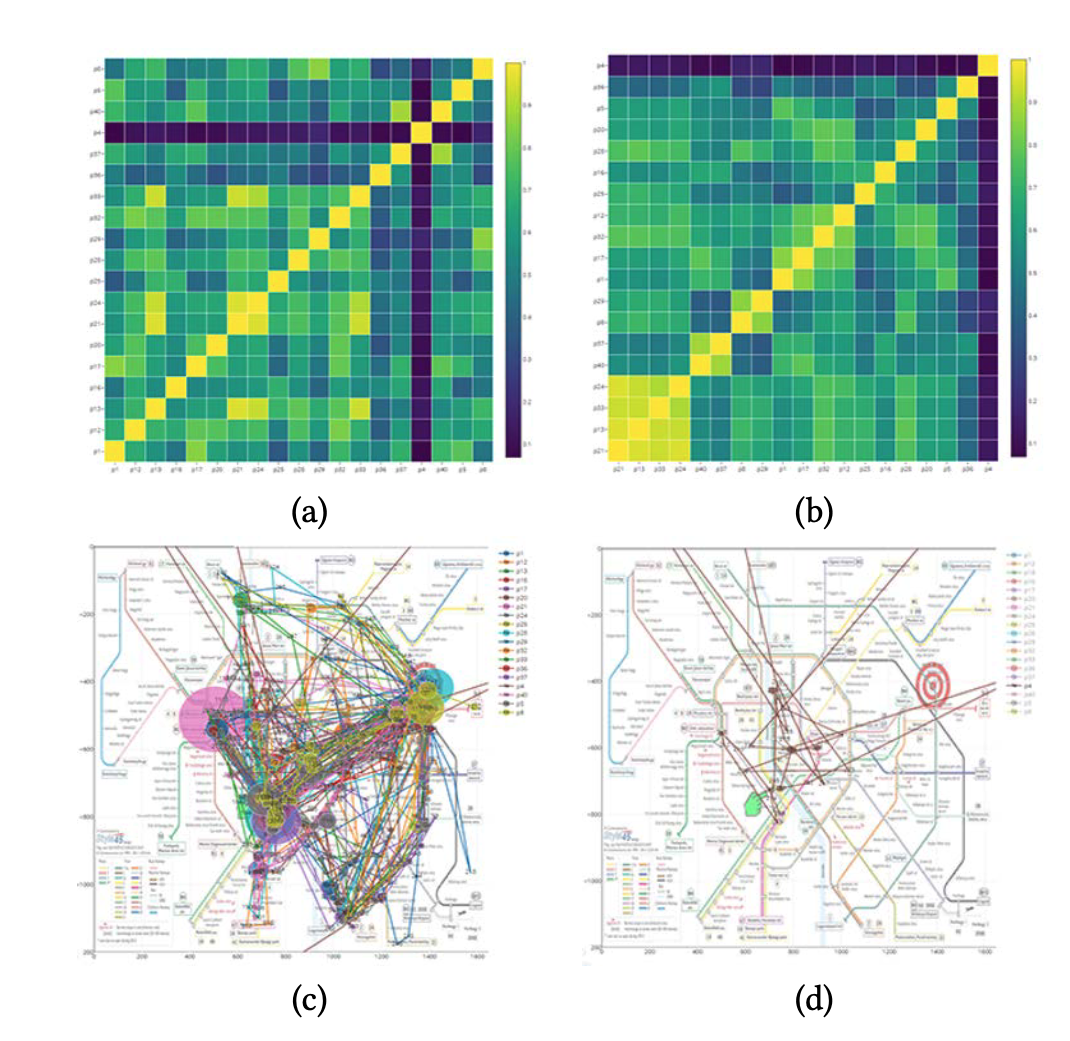 Finding the outliers in scanpath dataMichael Burch, Ayush Kumar, Klaus Mueller, and 5 more authorsIn Proceedings of the 11th ACM Symposium on Eye Tracking Research & Applications, Jun 2019
Finding the outliers in scanpath dataMichael Burch, Ayush Kumar, Klaus Mueller, and 5 more authorsIn Proceedings of the 11th ACM Symposium on Eye Tracking Research & Applications, Jun 2019@inproceedings{burch_finding_2019, title = {Finding the outliers in scanpath data}, author = {Burch, Michael and Kumar, Ayush and Mueller, Klaus and Kervezee, Titus and Nuijten, Wouter and Oostenbach, Rens and Peeters, Lucas and Smit, Gijs}, booktitle = {Proceedings of the 11th ACM Symposium on Eye Tracking Research \& Applications}, pages = {1--5}, year = {2019}, doi = {10.1145/3317958.3318225}, isbn = {978-1-4503-6709-7}, series = {ETRA '19}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, month = jun, }